本文來源於:施家邦 工控邦
Q11.LXM26/LXM28係列伺服報AL013,AL014,AL015如(rú)何處理?
LXM26/28伺服報AL013,LA014和AL015分(fèn)別表示(shì)OPST(停止(zhǐ)操作)觸發,CWL(負極限(xiàn)限位)觸發(fā),CCWL(正極限限(xiàn)位)觸發,如果在不使用上述(shù)功能(néng)的情況下,可以設置P2-15=0,P2-16=0,P2-17=0,斷電重啟後,即可解除該故障。
Q12.LXM26/28係列伺服選(xuǎn)型需要選擇哪(nǎ)些配件?
LXM26/28係列伺服選型需要如下配件:
以伺服驅動器LXM28AU10M3X搭配BCH2MM1023CF6C為例:
1.動力電纜一根,或者動力電纜(lǎn)接頭一套用戶(hù)自行製作電纜,例如電纜型號VW3M5D2FR30TK(3米帶鎧裝電纜),或接頭型號(hào)VW3M5D2F。
2.編碼器電纜(lǎn)一根,或者編碼器接頭一套(tào)用(yòng)戶自行製作電纜,例如編碼器電纜型號VW3M8D2AR30TK(3米帶鎧裝(zhuāng)電纜(lǎn)),或接頭型號VW3M8D2A。
3. IO接線端子塊(需(xū)要用(yòng)到IO端子控製時選配),可以選擇帶0.5米電纜的端(duān)子台或端子接頭自行製作電纜,帶電纜的(de)端(duān)子台型號為(wéi)VW3M1C13,端(duān)子接頭型號為VW3M1C12(3個/包出售)。
Q13.LXM26/28係列伺服如何點動?
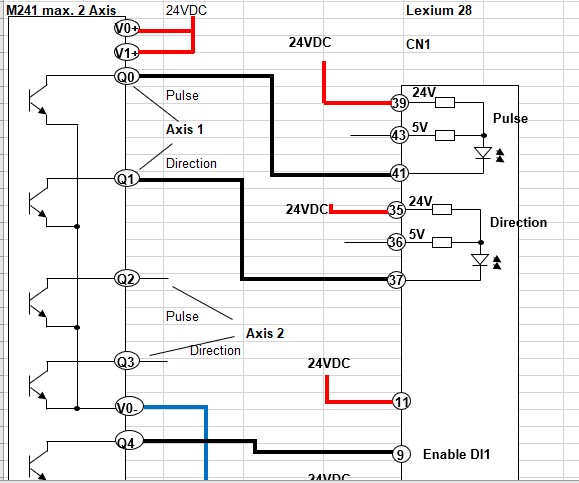
Q14.LXM26/28係列伺服PT模式如何接線?
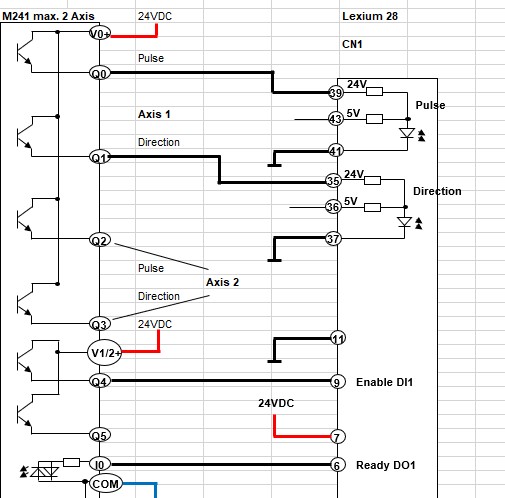
漏極接線如下:
Q15.LXM28A係列伺服CANopen通訊需要設置哪些參數?
LXM28A係列伺服在CANopen通(tōng)訊時,需要設定以下參數:
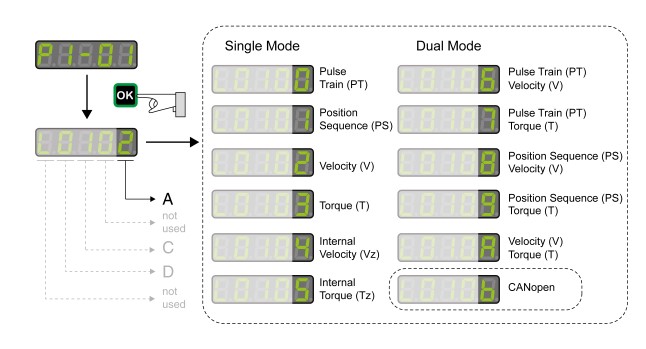
1.P1-01=B,設置(zhì)控製模式為CANopen。
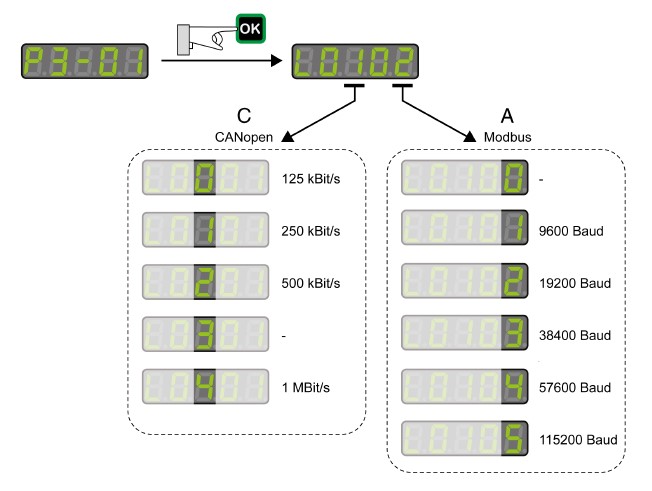
2.P3-01的(de)C位,CANopen通訊波特率,此(cǐ)參數需與主站配置一致,具體對應關係如(rú)下圖:
3.P3-05為CANopen站地址,此地(dì)址在一個CANopen網絡中必須唯一,且必須與主站配(pèi)置設置一致,注意,若不使用CANopen控製(zhì),建議將P3-05設置為0,避免報通訊錯(cuò)誤(wù)或警告。
4. 通過通訊(xùn)設(shè)置電子齒輪比,6091和6092,具體設置方法見問題4。
5.若不使用極限限位等功能,則(zé)將P2-15,P2-16,P2-17參數設置(zhì)為0,若使用則需要(yào)接(jiē)對應的DI端(duān)子。
Q16.LXM26/28係列伺服在PT模式需要設置哪些參數?
LXM26/28係列伺服PT模式需要(yào)設定的參數如(rú)下:
1.P1-00設置脈衝類型,例如脈衝加方向類(lèi)型則將A位設置為2,AB相信號則將A位設置為(wéi)0,C位用於設置脈衝是高電平有效還是低電平有效,0為高電平有效。
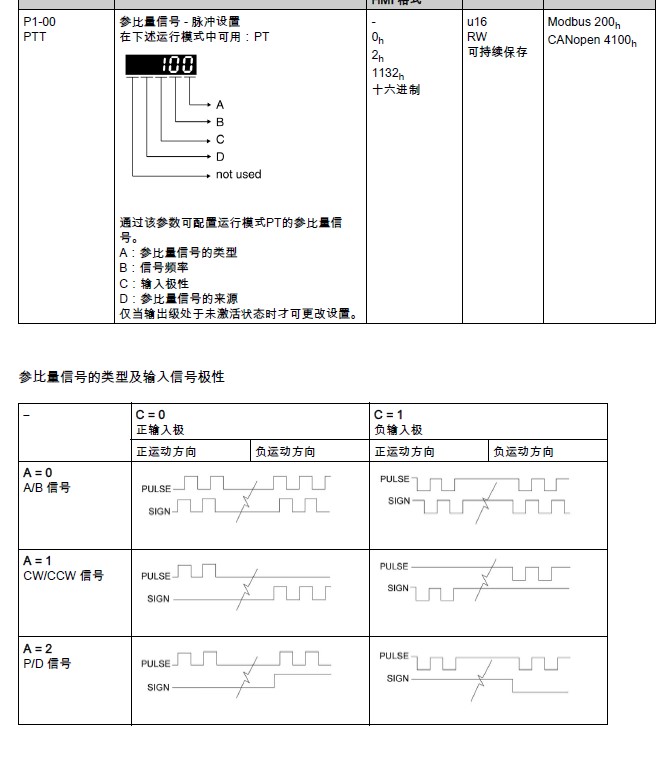
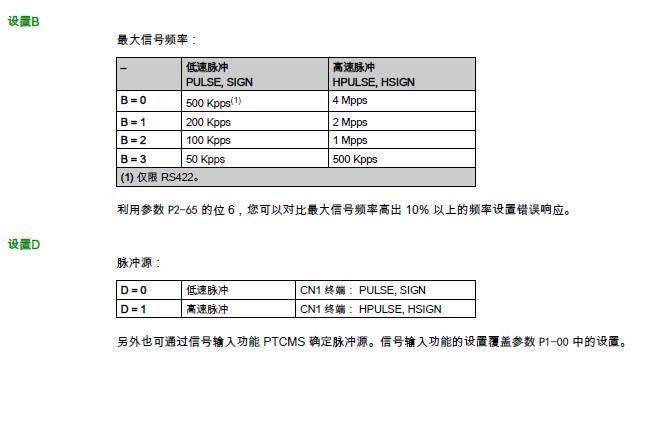
B位(wèi)用於設置最大頻(pín)率是多少,此參數與外部脈衝信號的最大頻率相關,建議(yì)大於外部脈衝信號的(de)最大頻率,D位用(yòng)於選擇使用高速脈(mò)衝(chōng)還是低速脈衝,這(zhè)兩種(zhǒng)方式接(jiē)線(xiàn)也不一樣,通常默認(rèn)低(dī)速脈衝。
2.P1-01=0,表示(shì)使用PT模(mó)式,下表為LXM28A係(xì)列伺服的相關模式設置參數。
3.P1-44,P1-45設置電子齒輪比,具體設置方法見例4。
4.使能是外部使能(néng)還是內部使能,若為(wéi)上電使能,則將參數P2-10和P2-68均(jun1)設(shè)置為1,斷電再上電後即可使能。
5.若不使用極限限位等功能,則將P2-15,P2-16,P2-17參數設置為0,若使用則需要接對應的DI端(duān)子。
Q17.LXM26/28係列伺服報AL508和WN701如何處(chù)理?
LXM26/28係列伺服報WN701表(biǎo)示驅動放(fàng)大(dà)器過載(折返電流)已達到警告(gào)值,建議減小(xiǎo)P1-24的值,直到驅動器(qì)不報警(jǐng)告。
LXM26/28係列伺服報AL508表示驅動放大器(qì)過載(折返電流)過載,建議減(jiǎn)少P1-23的值,直到驅動器不報故障(zhàng)。
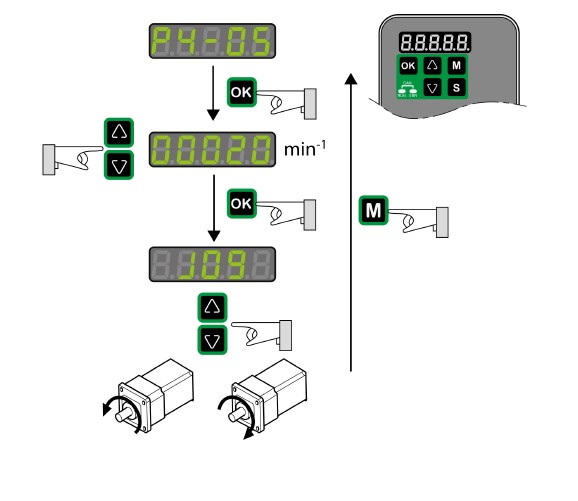
Q18.LXM26/28係列伺服如何在麵板上監視伺服狀態信息?
LXM26/28係列伺服使用麵板監視伺服狀態信息需要設置(zhì)P0-02參數,具體參數值對應的功能如下:
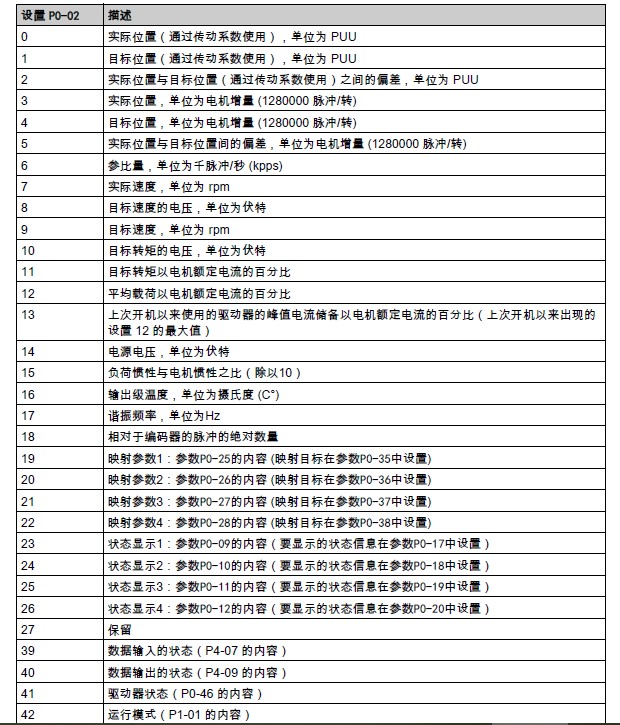
例如需要監視伺服的實際轉速(單位為RPM),則需要將P0-02設置為7,點擊OK後麵板上顯示的即為伺服的實際轉速(單位為RPM)。
Q19.LXM26/28係列伺服如何強製數字量輸入?
LXM26/28係列伺服強製數字量輸入需要設定2個參數:
1.P3-06設置是否允許(xǔ)強製相關的DI,其中第0-7位(wèi)對應數(shù)字量輸入DI1-DI8,值0表示數字(zì)量輸入不可以被(bèi)強製(zhì),值(zhí)1表(biǎo)示(shì)輸入可以被強製。
2.P4-07設(shè)置是否強製相關DI,其中第0-7位對應數字量輸入DI1-DI8,值0表示不強(qiáng)製相關輸入(rù),值1表示強製相關輸入。
例如強製數字量輸入1和數字量輸入5,則需(xū)要將P3-06改為0X0011,2進製(zhì)為00010001
表示允許強製數字量輸入1和(hé)數字量輸入5
P4-07設置為0X0011,二進(jìn)製為00010001,表示強製數(shù)字量輸入(rù)1和數字量輸(shū)入5
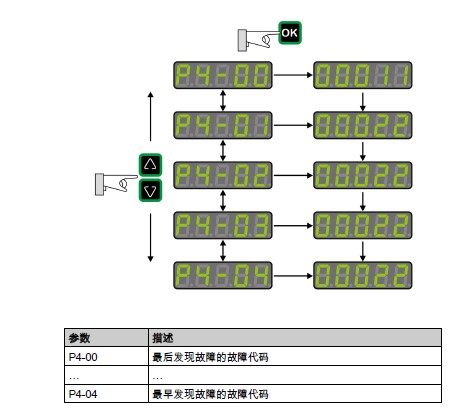
Q20.LXM26/28係(xì)列伺服如何查看(kàn)曆史故障?
參數P4-00到P4-04能讀(dú)取最後的5個(gè)曆史故障,通過P0-47可以讀取(qǔ)最後的(de)警告。
例如P4-04=3E1,表示此伺服最後一個故障為AL3E1,表示在執行絕對運動之前未(wèi)執行回原點的動作。
往(wǎng)期回顧(gù)
上一篇:軟起動器選型指南(一)
下一篇:配電房標準化怎麽做?
服務熱線:0371-60298207 13383812899
公司傳真:0371-60298207
公司郵箱:nhauto@urheva.com
公司地址(zhǐ):河南省新鄭市薛店鎮中德產業園47-4號(hào)樓
技術支持:鄭州網站製作 豫ICP備2020034884號-1
 官方微信公眾號
官方微信公眾號